Volvo razvija nove napredne varnostne sisteme
Volvovi varnostni strokovnjaki vložijo veliko intenzivnega raziskovalnega dela, da peljejo svojo vizijo naprej; v prihodnosti Volvo vozila ne bodo vpletena v prometne nesreče. Korak na tej poti je cilj leta 2020, da ne bo nihče resno poškodovan v novih Volvo vozilih.
Volvo izvaja števlne raziskave delovanja
»Gremo s pravim korakom v pravo smer. Imamo mnogo raziskovalnih projektov z namenom razvoja tehnologij za Volvo modele prihodnosti,« pravi Jan Ivarsson, manager varnostnih strategij in pogojev pri Volvu.
 Mnogo novih tehnologij je narejenih po voznikovem vedenju v modernem prometnem okolju. Današnji vozniki se razlikujejo od včerajšnjih. Na primer, raziskave treh različnih raziskovalnih inštitutov v ZDA so pokazale, da moderni vozniki namenijo 25 do 30 % svojega časa za volanom za druge stvari, kot na primer osredotočenju na mobilno komunikacijo. Vozniki, ki opravljajo klice in preverjajo elektronsko pošto ali sporočila so postali povsem običajni – in glede na to, da to vpliva na voznikovo pozornost na cesti, jih moramo upoštevati pri razvoju novih tehnologij.
Mnogo novih tehnologij je narejenih po voznikovem vedenju v modernem prometnem okolju. Današnji vozniki se razlikujejo od včerajšnjih. Na primer, raziskave treh različnih raziskovalnih inštitutov v ZDA so pokazale, da moderni vozniki namenijo 25 do 30 % svojega časa za volanom za druge stvari, kot na primer osredotočenju na mobilno komunikacijo. Vozniki, ki opravljajo klice in preverjajo elektronsko pošto ali sporočila so postali povsem običajni – in glede na to, da to vpliva na voznikovo pozornost na cesti, jih moramo upoštevati pri razvoju novih tehnologij.
»V moderni mobilni družbi imamo družabno življenje s seboj, kamorkoli gremo. Zato avtomobil ni izjema. Tako razvijamo tehnologije, ki vozniku zagotavljajo pravo podporo vsak trenutek,« doda Jan Ivarsson.
Raziskave Volva se osredotočajo na 3 glavna področja: ostati varen na trenutnem varnostnem pasu, preprečiti nesreče v križiščih in priključkih in preprečiti trčenja z divjimi živalmi. Trenutno potekajo naslednji raziskovalni projekti:
- Samostojna podpora pri vožnji
- Podpora v križiščih
- Zaznavanje živali
Samostojna vožnja v kolonah Samostojna podpora pri vožnji pomaga vozniku ostati na njegovem voznem pasu in slediti ritmu prometu, če se naredi kolona. Z uporabo podatkov s kamere in radarskih senzorjev lahko vozilo sledi sprednjemu vozilu. Motor, zavore in volan se odzivajo samodejno. Če mora sprednje vozilo nepričakovano hitro reagirati zaradi ovire na cesti, je vozniku v pomoč krmilni sistem, ki omogoči, da vozilo zavije v isto smer.
Samostojna podpora pri vožnji pomaga vozniku ostati na njegovem voznem pasu in slediti ritmu prometu, če se naredi kolona. Z uporabo podatkov s kamere in radarskih senzorjev lahko vozilo sledi sprednjemu vozilu. Motor, zavore in volan se odzivajo samodejno. Če mora sprednje vozilo nepričakovano hitro reagirati zaradi ovire na cesti, je vozniku v pomoč krmilni sistem, ki omogoči, da vozilo zavije v isto smer.
 »Vožnja v počasni koloni je monoton in dolgočasen del vsakdana mnogih voznikov. S tehnologijo za samostojno vožnjo lahko vozilo pomaga vozniku udobno in varno slediti sprednjemu vozilu,Ta funkcija ima veliko možnosti, da olajša voznikovo življenje. Naša prva generacija napredne tehnologije se osredotoča na vožnjo v kolonah pri nizkih hitrostih. Vozilo sledi sprednjemu vozilu na istem voznem pasu. Seveda je voznik vedno tisti, ki se odloči. Upravljanje lahko prevzame kadarkoli želi,« razloži Frederik Lundholm, funkcijski razvijalec v oddelku varnostne funkcije.
»Vožnja v počasni koloni je monoton in dolgočasen del vsakdana mnogih voznikov. S tehnologijo za samostojno vožnjo lahko vozilo pomaga vozniku udobno in varno slediti sprednjemu vozilu,Ta funkcija ima veliko možnosti, da olajša voznikovo življenje. Naša prva generacija napredne tehnologije se osredotoča na vožnjo v kolonah pri nizkih hitrostih. Vozilo sledi sprednjemu vozilu na istem voznem pasu. Seveda je voznik vedno tisti, ki se odloči. Upravljanje lahko prevzame kadarkoli želi,« razloži Frederik Lundholm, funkcijski razvijalec v oddelku varnostne funkcije.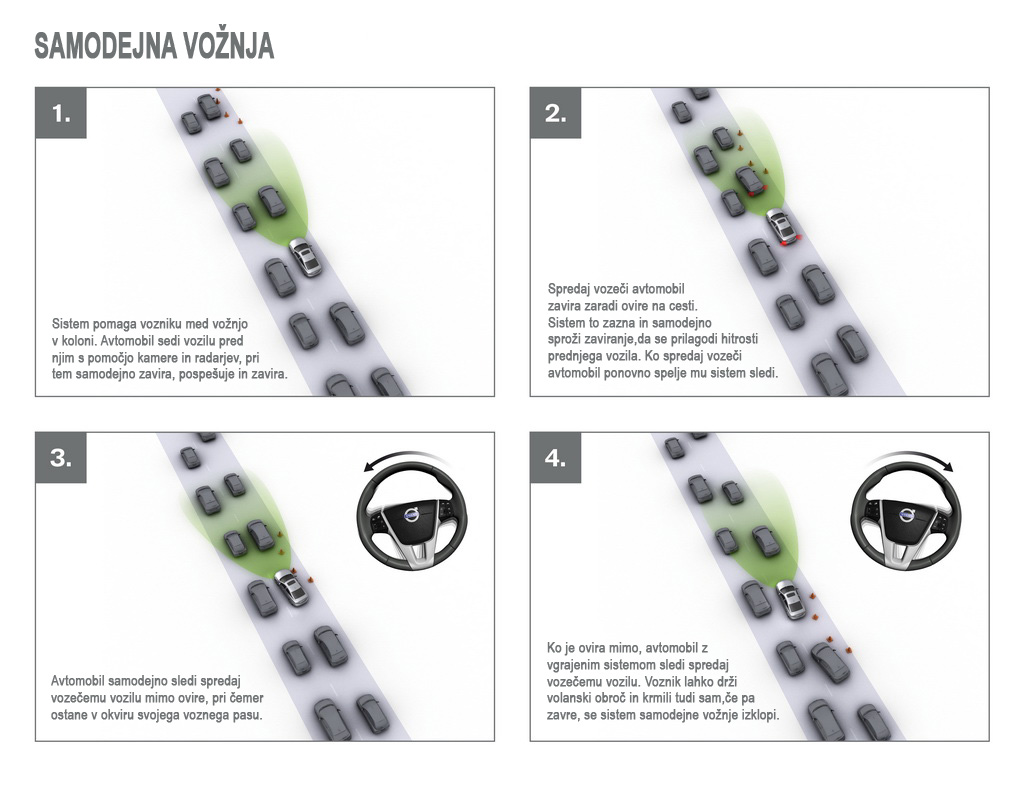
Samodejno zaviranje v križiščih Križišča in priključki so najbolj kompleksni deli modernega prometnega okolja. Ko več cestnih uporabnikov hkrati križa pot drugemu in iz različnih smeri, je potrebna le majhna napaka za hudo nesrečo.V ZDA se je kar 21,5 % vseh smrtnih nesreč v letu 2007 zgodilo v križiščih in v 16 EU državah (s Švedsko) 20,6 % v letu 2006.
Križišča in priključki so najbolj kompleksni deli modernega prometnega okolja. Ko več cestnih uporabnikov hkrati križa pot drugemu in iz različnih smeri, je potrebna le majhna napaka za hudo nesrečo.V ZDA se je kar 21,5 % vseh smrtnih nesreč v letu 2007 zgodilo v križiščih in v 16 EU državah (s Švedsko) 20,6 % v letu 2006.
Mattias Brännström, ki ima doktorat iz aktivne varnosti, je zadolžen za Podporo v križiščih, raziskovalni projekt z Volvo Car Corporation in tehnološko univerzo v Chalmersu. Sistem opozori in samodejno zavira, če je potrebno. »Podpora v križiščih uporablja senzorje, da zajema celotni scenarij prometa. Če se zazna kritična situacija, je odločitev za intervencijo narejena s svetlobno hitrostjo,« razloži Mattias Brännström.
Dodatno pojasni z risbo kolone vozil, ki zavija v križišču levo. Ko na semaforju posveti zelena luč,  vozilo za vozilom zavije levo. Nenadoma prihajajoče vozilo prevozi rdečo luč in ustvari nevarnost. »V taki situaciji vozilo, ki zavija, samodejno začne zavirati ter tako prepreči trčenje. Podpora v križiščih ne pomaga le pri voznikovih napakah, vendar tudi drugih uporabnikih prometa,« doda Mattias Brännström.
vozilo za vozilom zavije levo. Nenadoma prihajajoče vozilo prevozi rdečo luč in ustvari nevarnost. »V taki situaciji vozilo, ki zavija, samodejno začne zavirati ter tako prepreči trčenje. Podpora v križiščih ne pomaga le pri voznikovih napakah, vendar tudi drugih uporabnikih prometa,« doda Mattias Brännström.
Pravi tudi, da se Volvo z varnostnimi pristopi približuje temu, da se bo vozilo vedlo kot človek. Senzorji so oči, računalniki so možgani in zavore so mišice.
»Z našo napredno tehnologijo želimo narediti tako, kot bi naredili ljudje v enaki situaciji, če bi imeli čas za odziv. Želimo zagotoviti asistenco v čim več situacijah,« pravi Mattias Brännström.
Da bi pridobili potrebne podatke za razvoj takih sistemov, vozila prevozijo na tisoče kilometrov v različnih prometnih okoljih po celem svetu. Saj mora sistem pomagati tako voznikom v Bangkoku kot v Vancouvru.
Zaznavanje živali se osredotoča na trčenja z divjimi živalmi Ta kolekcija podatkov pa ni omejena le na urbano okolje. Na podeželju in odmaknjenih področjih je mnogo resnih trčenj, ki vključujejo divje živali.
Ta kolekcija podatkov pa ni omejena le na urbano okolje. Na podeželju in odmaknjenih področjih je mnogo resnih trčenj, ki vključujejo divje živali.
Nesreče z divjimi živalmi so velik mednarodni prometni problem. V Kanadi je kar 40.000 takih nesreč zabeleženih vsako leto. Švedska je beležila 47.000 trčenj z živalmi leta 2010. 7.000 je bilo trčenj z losom. Enako situacije najdemo tudi na Norveškem, Finskem in v Rusiji. V ZDA umre 200 ljudi na leto v trčenjih z divjimi živalmi, predvsem jeleni.
Seveda pa uradna statistika ne pokaže celotne slike. Na primer, ne vključuje vseh nesreč, v katerih se voznik izogne živali in se zato zaleti v drugo vozilo ali zleti s ceste. Raziskava nesreč med letom 2003 in 2010 univerze iz Umeå pravi, da je kar 23 % usodnih nesreč po tem, ko se je voznik poskušal izogniti losu na cesti – kar pa ni prikazano v uradnih statistikah nesreč z divjimi živalmi.
Volvo Car Corporation sedaj razvija sistem Zaznavanje živali, ki zazna in samodejno zavira podnevi in ponoči. »Tehnologija je nadaljnji razvoj našega sistema zaščite pešcev. Velik pomen smo namenili temu, da sistem deluje tudi ponoči, saj se večina trčenj z divjimi živalmi zgodi ob zori ali mraku,« razloži Andreas Eidehall, tehnični strokovnjak za aktivno varnost.
Nesreče z divjimi živalmi se pogosto zgodijo pri potovalni hitrosti. Namen je, da se hitrost zmanjša iz  100-110 km/h na pod 80 km/h. Ko je hitrost pod 80 km/h so varnostni sistemi avtomobila efektivni in tveganje za hujše poškodbe je manjše. To pa zahteva, da se žival zazna na razdalje 30 metrov.
100-110 km/h na pod 80 km/h. Ko je hitrost pod 80 km/h so varnostni sistemi avtomobila efektivni in tveganje za hujše poškodbe je manjše. To pa zahteva, da se žival zazna na razdalje 30 metrov.
Še en pomemben vidik je odzivni čas – čas med identifikacijo predmeta do reakcije sistema. Sistem zazna oblike živali ter njihove vzorce premikanja skozi ogromno količino zbranih podatkov. Zbiranje slik živali v gibanju poteka nenehno in gre za zelo kompleksen proces.
 »Gre za velik izziv pri zbiranju podatkov, ki nam pomagajo razumeti, kako lahko zaznamo nekaj, kar je narava naredila najboljše, da se zakrije. Osredotočeni smo na velike živali, saj povzročijo največ škode in najhujše poškodbe. Delali smo z losi in velikimi jeleni, vključili pa smo tudi konje in ostalo živino. Naslednji korak v prihodnosti bo zaznati tudi manjše živali, kot so srne in divji prašiči,« pravi Anders Eidhall.
»Gre za velik izziv pri zbiranju podatkov, ki nam pomagajo razumeti, kako lahko zaznamo nekaj, kar je narava naredila najboljše, da se zakrije. Osredotočeni smo na velike živali, saj povzročijo največ škode in najhujše poškodbe. Delali smo z losi in velikimi jeleni, vključili pa smo tudi konje in ostalo živino. Naslednji korak v prihodnosti bo zaznati tudi manjše živali, kot so srne in divji prašiči,« pravi Anders Eidhall.
Uspeh zahteva sodelovanje
»Razvoj teh tehnologij napreduje zelo hitro,« zaključi Jan Ivarsson. »In z nizkimi cenami senzorjev in drugih elektronskih komponent je naš namen, da bodo te napredne rešitve v prihodnosti v prav vsakem našem avtomobilu. Tesno sodelovanje z relevantnimi javnimi organi, zavarovalnicami in drugimi avtomobilskimi proizvajalci je prav tako pomembno pri doseganju vizije – brez nesreč v prometu.«
Po sporočilu za javnost povzel: Jure Merkač